
过去一年,长视频理解的主流思路几乎是一个共识:把上下文窗口拉长。从 32 帧到 128 帧再到上千帧,大家比的是谁能往模型里塞进更多的画面。Spatial-TTT 这篇论文一上来就把这个共识掀了:核心挑战根本不是窗口够不够长,而是空间信息怎么被选择、组织和保留。
换句话说,你给模型看一段两小时的房间漫游视频,真正的难题不是它能不能”记住”这么多帧,而是它能不能把”沙发在窗户左边、桌子上有三个杯子、走廊尽头是厨房”这种 3D 空间证据,在画面不断流进来的过程中持续维护住。塞进上下文窗口是把信息堆着,不是把信息整理好。
Spatial-TTT 的答案是测试时训练(Test-Time Training,TTT)。它维护一组会在推理时在线更新的”快速权重”(fast weights),把这组权重当成一块紧凑的非线性记忆,边看视频边把空间证据压进去。这是清华大学、腾讯混元和南洋理工联合做的工作,2026 年 6 月刚被 ECCV 2026 接收,代码和论文都在 GitHub 上开源了。
整个机制可以用一条很短的流水线概括:视频流不是一次性灌进去的,而是分成一个个块流进来。

每来一个视频块,模型就用它在线更新快速权重,把这一段时间里的 3D 空间证据吸收进记忆里,然后再基于更新后的空间状态去回答问题。这就是”流式”两个字的含义:它处理的是源源不断的观测,而不是一段定长的录像。
这篇文章想讲明白的就一件事:用”会更新的记忆”代替”会膨胀的窗口”,这条路到底是噱头还是真有东西,以及如果你在做视频理解或者空间智能,它值不值得你花一个下午去读。
打动我的几个设计
先说最核心的那一下:快速权重当记忆。传统 Transformer 处理长视频,KV cache 是线性甚至更糟地膨胀,帧越多显存越扛不住。Spatial-TTT 把这套逻辑换掉了,它不存所有帧的 KV,而是让一组参数在线吸收信息,记忆体积近似恒定。论文给的数字很直接:在 1024 帧的输入下,相比基座 Qwen3-VL-2B,理论算力 TFLOPs 和峰值显存都砍掉了超过 40%。
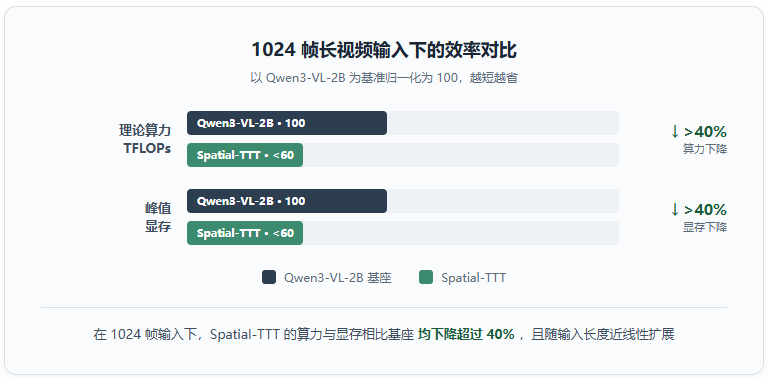
上面这张图把”近线性扩展”这个抽象说法落到了地上。窗口派的方案在长序列下是被显存和算力拖死的,而 Spatial-TTT 靠在线更新的快速权重把曲线压平了,这是它敢说”流式”和”无界视频”的底气所在。
第二个我觉得有意思的是空间预测机制。常规的 TTT 用的是逐点投影,每个 token 各管各的,完全忽略了画面里的空间结构。Spatial-TTT 在 TTT 层上加了深度可分离的 3D 时空卷积,让快速权重去学”这一块空间和那一块空间、这一帧和下一帧之间的对应关系”,而不是把每个 token 当孤立的点。对于要理解几何结构和物体位置的空间任务,这个改动是对症的。
第三个是它的混合架构,不是把所有层都换成 TTT。Spatial-TTT 按 3:1 的比例,让 TTT 层和自注意力”锚点层”交错排布。TTT 层负责高效压缩长空间上下文,锚点层用来保住基座预训练里学到的视觉语义知识。这是个很务实的取舍,纯 TTT 容易把预训练能力丢掉,掺几层自注意力当锚,等于给模型留了根缆绳。
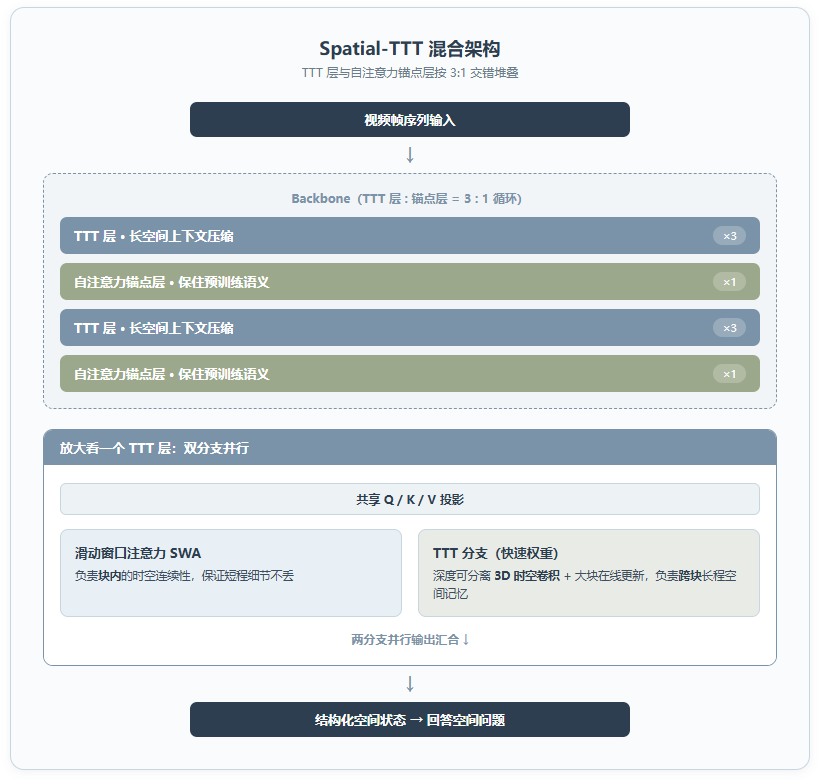
看这张架构图就清楚了,TTT 层内部其实是双分支并行:滑动窗口注意力(SWA)和 TTT 分支共享同一套 Q/K/V 投影,SWA 管块内的时空连续性,TTT 分支管跨块的长程记忆。这种并行设计加上大块更新(chunk size 给到 2648),是为了榨硬件并行度,不至于因为引入在线更新就把吞吐拖垮。
还有一个容易被忽略但其实很关键的点:数据。空间问答数据通常是稀疏的局部监督,梯度信号很弱,快速权重根本学不到怎么组织全局 3D 信息。作者专门构造了一套密集场景描述数据集,把全局上下文、物体和计数、空间关系都写进去,等于手把手教快速权重该往记忆里塞什么、怎么组织。架构再好,没有对的监督信号也是空转。
上手是什么感觉
先把预期摆正:这是一个研究代码库,不是一个 pip install 完就能用的产品。它的目录结构很学术,核心是基于 Qwen3-VL 改的 qwen-vl-finetune 训练框架,外加一套 VSI-Bench 评估脚本。想跑通,你得有趟过 PyTorch 训练栈的经验。
环境这一关不轻松。官方推荐 Python 3.10 以上,torch 要 2.6.0 起步,transformers 得 4.57.0,还要装 deepspeed、flash-attn、accelerate、peft、triton、torchcodec 这一串。flash-attn 那句 --no-build-isolation 的编译,凡是装过的人都知道有多容易卡住,CUDA 版本和 torch 版本一旦对不上就得返工。
conda create -n spatial-ttt python=3.10 -y
conda activate spatial-ttt
pip install torch torchvision deepspeed accelerate peft transformers==4.57.0
pip install flash-attn --no-build-isolation
pip install torchcodec qwen-vl-utils
训练这一步对硬件的要求更现实。官方训练脚本默认 8 卡起跑,chunk size 2648、窗口 2648、单视频最多 128 帧,用的是 Spatial-TTT-Data-97k 这套约 9.7 万样本的精简数据集。你得先去 Hugging Face 下数据,在 qwenvl/data/__init__.py 里配好标注路径和数据路径,再改训练脚本里的模型路径和输出目录。没有多卡机器,这一步基本只能看着别人跑。
评估相对友好一些。官方把 VSI-Bench 的评测脚本放在 evaluation/spatial/ 下,给一个 checkpoint 路径和输出名就能跑,默认 128 帧。如果你只是想验证一下方法的效果,而不是从头训,官方还放出了一个叫 Spatial-TTT-nano 的 SFT 小模型,在不到 100 万样本上训出来的,可以直接下来评测体验。
所以上手路径其实分两档:研究者想复现训练,得备好 8 卡和耐心;只想看效果的,下 nano 模型跑评估就行。这种”小模型先放出来让人试水”的做法,在学术开源里算是有诚意的。
什么人该看,什么人可以划走
这个项目的受众边界其实相当清晰。它不是给应用开发者准备的,是给做研究和做底层能力的人准备的。下面这张表把适用和不适用的情况摆清楚。
| 你的情况 | 适不适合 | 原因 |
|---|---|---|
| 研究长视频/流式视频理解 | 很适合 | TTT 替代长上下文窗口是个有前瞻性的方向 |
| 做具身智能/空间感知 | 很适合 | 它本来就是冲着空间智能去的,VSI-Bench SOTA |
| 想给产品集成一个视频问答模块 | 暂时别碰 | 只有 nano,全量模型还在 TODO,没法当生产组件 |
| 想要开箱即用的 API 或权重 | 等一等 | 完整模型和完整训练数据都还没放 |
最该泼的一盆冷水是发布进度。截至 2026 年 6 月,官方只放出了 nano 这个小模型和 97k 的迷你数据集,README 里的 TODO 清单还挂着三项没做:
-
全量模型:在全部数据上训出来的完整版本,也就是论文里拿 SOTA 的那个 -
完整训练数据:通用空间问答数据加上密集场景描述数据 -
更大规模的 Spatial-TTT 模型:参数量更大的后续版本
换句话说,论文里那个真正拿到 SOTA 成绩的主模型,现在你还下不到,手头能玩的只有 nano 这个用来验证方法的小号。
这就引出一个现实判断:如果你冲着”拿来即用的强空间视频模型”来的,现在来早了。但如果你是研究者,想验证 TTT 这条路的有效性、或者在它的训练框架上做二次开发,现有的 nano 模型加 97k 数据已经够你把方法跑通、把直觉建立起来了。两种需求,结论正好相反。
这项目靠不靠谱
先说一句实在的:用 GitHub 的 Star 数和 Issue 热度去衡量一个 2026 年 3 月才开源的研究代码库,本来就不公平。这类项目的社区信号不在 star,在论文本身的分量和同行的反应。
从这个角度看,Spatial-TTT 的底子相当硬。作者阵容里,通讯作者 Yongming Rao(饶永明,腾讯混元)和 Yueqi Duan(段悦琦,清华)都是计算机视觉领域有积累的研究者,共一的三位也都是活跃在视觉方向的博士。机构是清华大学、腾讯混元、南洋理工三家联合。最直接的同行认可,是这篇论文在 2026 年 6 月拿到了 ECCV 2026 的接收,这是计算机视觉三大顶会之一,过了同行评议这一关,比任何 star 都更能说明问题。
| 指标 | 情况 |
|---|---|
| 开源协议 | Apache 2.0,商用友好 |
| 论文状态 | ECCV 2026 接收,arXiv 2603.12255 |
| 代码活跃度 | 提交数不多,最近一次更新在 2026 年 6 月 |
| 已发布资产 | nano 模型、97k 数据、streaming 数据、训练评估代码 |
还有一个容易被忽略的生态信号:README 主动把自己放出的 Spatial-TTT-Data-Streaming 数据集,关联到了另一个项目 Cambrian-S 的 VSR 和 VSC 任务上。Cambrian-S 是另一条做视频空间超感知的研究线,这种主动给同方向项目搭桥的做法,说明作者团队对自己在这个研究脉络里的位置很清楚,不是闷头发个 paper 就走。
代码维护这块要诚实:这是典型的研究项目节奏,27 个提交左右,更新围绕论文发布和 ECCV 接收这些节点走,不是那种天天有 commit 的活跃工程项目。指望它像生产级框架那样有快速的 Issue 响应和持续迭代,不现实。它的价值在方法和论文,不在工程维护。
我的真实判断
把它放回整个技术脉络里看,Spatial-TTT 的位置才清楚。它真正对标的不是某个产品,而是一整类”靠堆长上下文做视频理解”的思路,包括它自己的基座 Qwen3-VL。下面这张表,是我理解的它在同类工作里的坐标。
| 参照项目 | 处理长视频的方式 | 与 Spatial-TTT 的关系 |
|---|---|---|
| Qwen3-VL | 长上下文窗口 + 全注意力 | 它的基座,也是它要超越的对照组 |
| Spatial-MLLM | 静态空间理解,非流式 | 同组前作,Spatial-TTT 把它推向流式 |
| Cambrian-S | 视频空间超感知,另一条线 | 同方向,README 主动给它喂数据 |
| Spatial-TTT | 测试时训练 + 快速权重记忆 | 用在线更新的记忆替代膨胀的窗口 |
我的判断是,这个方向值得跟,但要看你跟的是什么。如果你跟的是”测试时训练能不能成为长序列建模的下一个范式”,那 Spatial-TTT 是一个很有信息量的早期样本。继 Mamba、线性注意力这些尝试之后,TTT 把”记忆”这件事变成了一组可在线训练的权重,思路上比固定的状态空间更灵活,Spatial-TTT 是把它落到视频空间智能这个具体场景的代表作之一。
但如果你跟的是”我现在就要一个能用的强模型”,那得踩刹车。前面说过,全量模型和完整数据还在 TODO 里挂着,nano 只是个验证用的小号。研究开源里”先放论文和小模型、大模型慢慢补”是常态,但常态不等于一定会补齐,TODO 清单能不能落地,得看团队后续的投入。这是跟任何研究代码库都要承担的不确定性。
还有个值得想的点:TTT 这条路的代价是什么?在线更新快速权重,意味着推理时多了一份训练的开销,虽然论文用大块更新和并行设计把吞吐压住了,但这套机制的工程复杂度明显高于”无脑加长窗口”。它在长序列上省了算力和显存,可在中短序列上,这套机制的额外开销值不值,论文里没有特别强调,这是我会留意的地方。
落到一句话:Spatial-TTT 不是给你拿去做产品的,是给你拿去想问题的。它最大的价值,是用一个拿到 ECCV 2026 和 VSI-Bench SOTA 的实证,把”流式空间智能不该靠堆窗口”这个判断,从口号变成了可复现的代码。这件事,对在做视频理解和空间智能的人来说,比一个能跑的 demo 更重要。
资源地址
一句话定调:这是给研究者的样本,不是给用户的产品
如果你在做视频理解、长序列建模或者空间智能,Spatial-TTT 应该进你的阅读清单。它把测试时训练这个有点抽象的范式,落到了流式空间感知这个具体场景,还拿出了 ECCV 2026 和 VSI-Bench SOTA 当证据,这比绝大多数停在 idea 阶段的工作扎实得多。
但别带着”下个权重就能用”的期待来。现阶段它只放出了 nano 小模型和迷你数据,全量模型和完整数据还在 TODO 里。它现在的身份,是一个让你验证方向、建立直觉、做二次研究的起点,而不是一个生产组件。
往大了说,这个项目真正有意思的地方,是它代表的那个判断:长视频理解的瓶颈,可能从来都不是窗口不够长,而是记忆不够聪明。这个判断对不对,未来一两年的视频大模型会给答案。而 Spatial-TTT,是少数已经把这个判断写成可复现代码的早期玩家之一。